Tóm tắt nội dung bài này
Bài viết này sẽ giúp bạn hiểu về motor trên quad và nếu bạn đang định build 1 em quad cho riêng mình thì bài này cũng sẽ giúp bạn trong việc chọn motor bạn cần.
Kể cả khi bạn mua sẵn hay nhờ người khác build thì cũng vẫn cần trang bị kiến thức để có thể xử lý nếu có vấn đề gì khi đi chơi xa hay lựa chọn mua pin, cánh phù hợp,…
Nếu bạn mới chơi và chưa có kiến thức nền thì vào đọc ngay bài Kiến thức để bắt đầu chơi FPV, hoặc tìm hiểu thêm về cánh và kiến thức về pin FPV.
Trước khi bắt đầu chọn motor thì bạn phải hình dung và tưởng tượng được trước mình định build quad gì đã, 3inch hay 5 inch hay 7 inch? Quad của bạn có nặng không? Cần bay lâu không? Có cần khỏe cục súc để nhào lộn không hay chỉ cần nhẹ nhàng đủ dùng?
Nếu bạn là người mới chưa hiểu gì về môn FPV này thì bạn nên đọc bài Kiến thức nhập môn FPV
Nếu đã hiểu sơ sơ rồi có thể tham khảo thêm các bài “Kiến thức về lựa chọn cánh FPV” “Pin Lipo và cách sử dụng an toàn, hiệu quả”
Sau khi đã xác định rõ thì sẽ bắt đầu:
Loại động cơ
Có 2 loại động cơ chính: Động cơ không chổi than và động cơ có chổi than. Thường thì động cơ không chổi than sử dụng cho mấy em quad to (tầm 2.5~3inch trở lên), còn có chổi than thường dùng cho mấy em tiny nhỏ, quad đồ chơi. Nhưng đấy là ngày xưa, còn bây giờ thì động cơ không chổi than cũng phổ biến trên cả mấy em tiny rồi.
 Mình không giải thích động cơ chổi than là gì, chỉ so sánh nhanh là động cơ chổi than rẻ hơn nhưng không chổi than thì tuy giá cao nhưng với cấu tạo trường vĩnh cửu giúp khi quay ít ma sát hơn, tiếng ồn giảm và tiết kiệm điện, khỏe hơn.
Mình không giải thích động cơ chổi than là gì, chỉ so sánh nhanh là động cơ chổi than rẻ hơn nhưng không chổi than thì tuy giá cao nhưng với cấu tạo trường vĩnh cửu giúp khi quay ít ma sát hơn, tiếng ồn giảm và tiết kiệm điện, khỏe hơn.
Hiện nay và tương lai chắc hiếm người chơi động cơ có chổi than.
Cấu tạo của Motor
Motor có 2 phần: Stator và Rotor.
Thuật ngữ Stator – trong motor bạn cứ nhìn vào và xác định xem se có 1 phần quay và 1 phần đứng im thì phần đứng im được gọi là stato, phần còn lại quay khi motor hoạt động gọi là Rotor. Stator bao gồm lõi sắt (các lá thép kĩ thuật điện ghép cách điện với nhau) và dây quấn.
 Trong Stator có các phần chính:
Trong Stator có các phần chính:
+ Cuộn dây cuốn điện/dây đồng (Winding): Có tác dụng cung cấp dòng điện để tác động đến nam châm làm rotor quay.
+ Ổ trục (Bearing): Giúp giảm ma sát cho trục (trục ở stator)
+ Các lá thép
+ Dây cấp nguồn điện: Cấp điện cho dây đồng
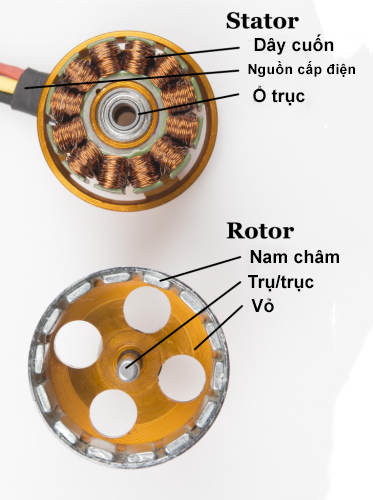 Các phần trong Rotor:
Các phần trong Rotor:
+ Nam châm: Từ dòng điện mà dây đồng cấp nó tạo thành từ trường làm motor quay được.
+ Trục
Khối lượng quad và size frame.
Bạn nên ước tính được khối lượng máy bay của mình khi build xong: frame, FC, ESC, motors, cánh, RX, VTX, antenna, ESC’s, Pin, GoPro, và các phụ kiện khác nếu có. Thế nên mới cần lên cấu hình search xem các linh kiện mua loại nào đọc thông số khối lượng để tính toán. Cũng không nhất thiết phải tính chính xác con số, cứ nhẩm nhẩm áng chừng tính dư thêm khối lượng để chọn motor cho thoải mái. Khỏe vẫn hơn là yếu mà.
Còn về size của frame, việc xác định size frame hay size của quad sẽ build cũng sẽ xác định được loại cánh mình sẽ dùng từ đó lọc được bớt loại motor cần lựa chọn đưa lên bàn cân so sánh.
Tính lực đẩy cần đến
Không biết có thừa không nhưng mình đọc thấy có nên cứ viết vào.
Đại loại là cần tính đến lực đẩy để đẩy con quad của mình lên khi đã có khối lượng. Công thức ở đây là lực đẩy max 100% phải lớn hơn ít nhất [khối lượng của quad ] x2 lần.
VD: Quad của bạn là 1kg thì lực đẩy max 100% cần đến phải ít nhất là 2kg khi. Và đẩy khỏe hơn thì càng tốt.
Theo tác giả bên oscarliang thì tốt nhất để thoải mái bay lượn thì lực đẩy lên gấp tối thiểu 5 lần, thậm chí là 10, 13 lần.
Tuy nhiên khỏe cũng đồng nghĩa với việc nguy hiểm vì chỉ cần kéo nhẹ cần ga cái là nó đã vút lên như tên lửa rồi, quad khó điều khiển hơn đòi hỏi sự khéo léo làm quen lâu hơn.
Nếu chỉ bay nhẹ nhàng cinematic thì tác giả khuyên gấp 3,4 lần thôi là được.
Giải thích về kích thước motor
Kích thước động cơ thường đưuọc quy định bằng 4 chữ số theo dạng – AABB. Trong đó AA là kí hiệu cho chiều rộng/đường kính của stator còn BB là chiều cao – cả 2 đều tính bằng đơn vị mm.
VD: Hiện nay có các loại size motor tương ứng với cánh 5” là: 2207, 2306, 2307 và 2407
 Thường thì:
Thường thì:
Stato càng cao (chiều cao) thì càng khỏe khi RPM (số vòng quay – Revolutions Per Minute) cao.
Còn nếu stato rộng thì lực xoắn (momen xoắn) của động cơ càng ổn định khi RPM thấp.
Trước khi giải thích kĩ hơn chúng ta cần nắm được cấu tạo trong motor có 2 loại nam châm: Nam châm điện và nam châm vĩnh cửu – chi tiết lý thuyết và khác biệt 2 thằng này thì google và nhiệm vụ của nó là gì thì mình cũng chưa tìm hiểu ra. Trong bài này mình chỉ cần các bạn hiểu tồn tại 2 loại nam châm này trong motor và sự liên quan cần biết ở đây bởi nó liên quan đến kích thước motor. Và cái phần nam châm điện ở trong motor quad chính là cái cục đứng im với các cuộn dây đồng ấy. Đó chính là stato.
Cách motor hoạt động
Khi kích thước của stato cao hơn thì kích thước của nam châm vĩnh cữu cần phải tăng cao hơn kích thước của coil – không biết gọi cái này là mấy cuộn dây đồng có chính xác không, các bạn nhìn ảnh dưới tự đoán, hiểu nhé.
Còn khi stato rộng thì kích thước các cuộn dây đồng phải tăng lớn hơn cục nam châm vĩnh cửu.
Nghe hơi lằng nhằng nhỉ? Hiểu đơn giản là tăng chiều rộng hay cao của stato sẽ làm tăng cả số lượng, kích thước của nam châm vĩnh cửu + mấy cuộn dây đồng. Điều này sẽ làm tăng lực quay/lực xoắn (momen xoắn) của động cơ giúp cho việc quay mấy loại cánh to, nặng hơn được ổn định.
Chốt lại thì Stato cao hay stato rộng tốt hơn?
Stator cao hơn đồng nghĩa với việc có diện tích bề mặt lớn hơn, do đó có thể cắt qua nhiều từ trường hơn và tản nhiệt tốt hơn. Stator càng cao càng khỏe và hoạt động ổn định khi RPM cao.
Còn Stator rộng sẽ có số lượng cục dây đồng và sắt trong nam châm điện hơn giúp cho việc ổn định lực quay và hiệu quả hoạt động của motor.
Nói thật là chốt lại chỗ kiến thức này đọc thêm thôi chứ mình cũng chưa hoàn toàn hiểu rõ được, nhưng nó giúp mình hiểu cái thông số 2306 2307 trên motor giờ nghĩa là gì.
KV
KV là chỉ số cho chúng ta biết số vòng quay/phút trong 1 volt. Đây là thông số quan trọng của động cơ không chổi than. VD: động cơ 2300KV sử dụng pin lipo 3S (12.6V) khi kéo max ga thì số vòng/phút khi chưa lắp cánh = 2300×12.6 28980.
Thế thì số KV càng cao càng khỏe đúng không? Thế thì bạn đã bao giờ tìm hiểu và thấy là mấy chú 5inch dùng motor số KV thường nhỏ hơn so với 3inch chưa?

Vì đó là thông số của nhà sản xuất ước tính khi chưa lắp cánh. Trên thực tế khi lắp cánh vào thì RPM không thể được như vậy do lực cản của không khí làm giảm đi hiệu năng quay.
KV càng cao thì sẽ quay cánh càng nhanh và sẽ ngốn nhiều điện hơn, tuy nhiên vòng quay nhanh nhiều hơn không có nghĩa là sẽ kéo quad mạnh lên vì quay nhanh vậy sẽ tạo ra lực đẩy nhiều hơn => Thế nên phải nhớ KV tỉ lệ nghịch với lực đẩy, đó là lý do chúng ta thường thấy cánh size lớn thường sử dụng motor có KV thấp hơn, trong khi cánh nhỏ phù hợp với KV cao hơn. Vì khi đó KV thấp sẽ tạo ra lực đẩy nhiều hơn giúp quad bay nhanh và khỏe hơn.
Không biết đến đây còn ai thấy khó hiểu nữa không? Nghe vô lý nhưng lại hoàn toàn thuyết phục nhỉ? Hehe
Kí hiệu N & P – Cực điện của motor (Poles) và nam châm
Nếu tò mò đọc tìm hiểu thông số của motor có thể bạn sẽ gặp kí hiệu (VD) “12N14P” in trên hộp của motor thì hãy hiểu rằng 12N nghĩa là motor có 12 cực điện ở stator và 14P là 14 cục nam châm vĩnh cửu gắn tại vòng của motor

Kích thước của motor khác nhau sẽ khác nhau cả số lượng cực điện. Dòng motor 22xx và 23xx thường có 12 cực điện và 14 thanh nam châm.
Giải thích nhiều khó hiểu, chỉ cần nhớ: Nhiều cực thì mượt mà; ít cực thì mạnh.
Cách chọn motor có kích thước phù hợp
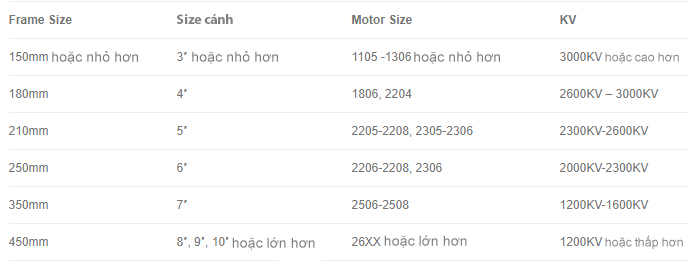
Các bạn cứ xác định rõ theo thứ tự: Size Frame => Size của cánh => Size của motor.
Lý do? Vì kích thước của frame sẽ quyết định dùng cánh size nào, mà size của cánh lại liên quan đến RPM tạo lực đẩy và nó sẽ ra thông số KV của motor cần chọn. Đơn giản hơn là nhìn vào bảng sau 1 phát là hiểu (bảng này lấy tiêu chuẩn dùng pin 4S).
Khối lượng của motor
Việc tính toán cân nặng của motor cũng ảnh hưởng đến hiệu năng bay, ở đây là cảm giác lái. Nó liên quan đến bài toán lên cấu hình cho quad của bạn với khối lượng ra sao thì hợp lý – cái này thì nó lại không có công thức chung rõ ràng – Ví dụ như khi bay bạn lộn quad hoặc xoay vòng thì nó sẽ cần thời gian để di chuyển và dừng tại đúng vị trí mà mình mong muốn. Và khi đó motor nặng hơn sẽ cần nhiều thời gian hơn để phản hồi, cái này sẽ ảnh hưởng tới độ nhạy, tính phản hồi của lệnh khi thực hiện
Những yếu tố ảnh hưởng đến hiệu năng của motor
Một số thứ ảnh hưởng đến motor cần quan tâm: Lực xoắn/quay (momen xoắn), Thời gian phản hồi, Nhiệt độ, Độ rung và cân bằng.
+ Lực xoắn/lực quay hay còn gọi là Momen xoắn:
Lực xoắn có nhiệm vụ giúp cho cánh quạt quay, nó là thứ quyết định việc RPM của motor tăng giảm nhanh hay chậm. Motor có lực xoắn cao sẽ mang lại độ phản hồi nhạy bén hơn vì RPM thay đổi nhanh hơn, nó cũng đồng nghĩa với việc có nhiều lực xoắn sinh ra sẽ giúp giảm đi hiện tượng prop-wash mà theo như mình hiểu là kiểu khi bạn đang bay cắm đầu xuống dưới (gọi là dive) hoặc hạ ga về 0 và quad đang rơi tự do rồi bạn kéo ga lên để không bị va chạm hoặc đổi hướng đột ngột thì bạn sẽ thấy quad bị rung vài cái như kiểu để lấy lại thăng bằng – kiểu như thay đổi đột ngột làm cho không khí, các lực cũng bị xáo trộn làm ảnh hưởng đến độ cân bằng của cánh khi đang quay. Thì đó là mình hiểu về prop-wash không chắc đúng không. Nhiều lực xoắn hơn cũng có nghĩa là có thể tải được cánh nặng hơn (hại điện hơn luôn). Nếu lực xoắn yếu mà tải cánh nặng quá thì khi bay sẽ cảm giác quad, motor phản hồi rất yếu – về lâu dài có thể gây quá tải và giảm tuổi thọ của motor.
+ Thời gian phản hồi:
Thời gian phản hồi thì nó lại phụ thuộc vào thằng lực xoắn trên. Lực xoắn nhiều thì thời gian phản hồi sẽ nhanh hơn. Thời gian phản hồi bị ảnh hưởng lớn từ độ nặng và pitch của cánh chứ không chỉ từ lực xoắn mà motor tạo ra.
+ Nhiệt độ:
Chắc đây là thứ để ý dễ và thường xuyên nhất. Khi motor quay thì việc nhiệt độ nóng không phải là lạ nhưng nếu nóng quá thì chắc chắn là quad, motor có vấn đề. Nếu vẫn cố mà không tìm cách khắc phục thì việc motor bị quá tải có thể làm cháy, hỏng motor. Thường thì motor khi bay xong chúng ta sẽ kiểm tra bằng việc cầm, chạm vào motor và giữ nguyên. Nếu cảm thấy nó nóng vừa phải vẫn có thể cầm nắm được thì là bình thường, nhưng nếu nóng đến độ mà cầm khoảng 3~7,8s cảm thấy nóng bỏng tay không thể cầm được tiếp thì có vấn đề.
 Nguyên nhân có nhiều, dễ gặp là do trọng lượng quad thay đổi, nặng => motor phải làm việc trâu hơn => Nóng. Do thiết kế của cánh cũng là nguyên nhân hay gặp cho việc motor nóng.
Nguyên nhân có nhiều, dễ gặp là do trọng lượng quad thay đổi, nặng => motor phải làm việc trâu hơn => Nóng. Do thiết kế của cánh cũng là nguyên nhân hay gặp cho việc motor nóng.
Cách xử lý vấn đề này thường là tìm xem nguyên nhân ở đâu để mà khắc phục thôi, nhiều khi có thể là vào Pid Tunning để thay đổi thông số phù hợp sẽ giúp motor chạy mát hơn. Còn về cái Pid Tunning này như nào thì nó là một mảng rất hack não trong FPV mà mình tìm hiểu mãi vẫn chưa hiểu, khi nào hiểu sẽ làm 1 bài riêng cho ae.
+ Độ rung và cân bằng:
Đang bay mà nhìn qua kính thấy quad rung lắc không cân bằng, rẽ cũng rung, tăng tốc cũng rung mà bay nhẹ nhàng thẳng cánh cò bay cũng rung. Nó không hề bình thường đâu mà là quad của bạn đang có vấn đề đấy. Thực tế thì quad của mình cũng đang có vấn đề về rung khi bay nhưng hiện tại thì đã khắc phục được bằng cách Pid Tunning – cứ vào pid hạ/tăng từng chỉ số một rồi bay thử cho đến khi cảm bớt rung và motor không nóng. Hoặc cũng có thể do quad phải cõng khối lượng nặng quá nên nó rung, chủ yếu thì anh em mình thấy xử lý bằng cách PID Tunning.
Chọn Motor hãng nào?
Có thể bạn sẽ thắc mắc là cần tìm hiểu mấy thông số kĩ thuật kia để làm gì, thấy anh em chơi hãng gì thì chơi con đó thôi. Cũng đúng, nhưng về lâu dài thì nên hiểu và tự chọn ra cho mình 1 motor cho riêng mình. Theo các pro nói thì người mới bay chưa thể cảm nhận được sự khác nhau của các hãng motor đâu nên cứ chơi hãng nào cũng được, chơi loại rẻ hỏng cho đỡ tiếc và hầu hết cũng khó để nói motor hãng nào tốt hơn, ngon hơn vì khi bay quen motor hãng nào thì sẽ thành fan của hãng đó mà xài thôi.

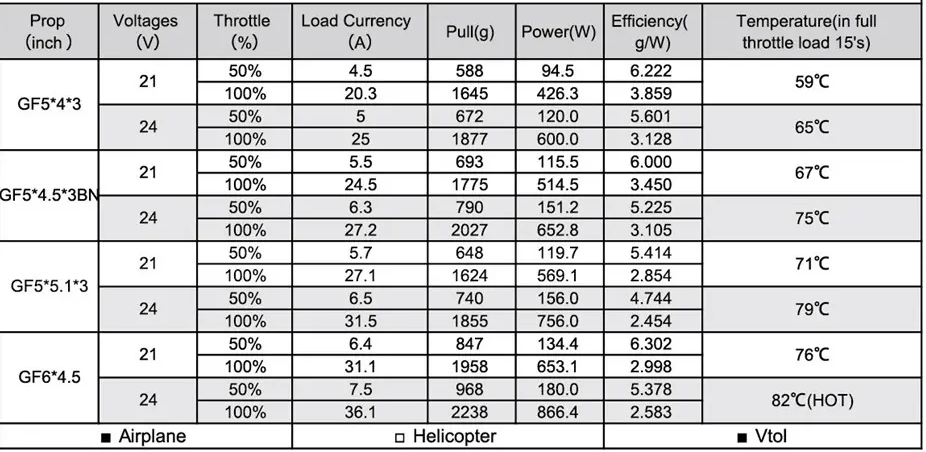
Việc hiểu các thông số để khi lựa chọn motor chúng ta sẽ xác định loại motor cần mua cho cấu hình phù hợp sau đó sẽ so sánh các thông số: Hãng A ngốn điện bao nhiêu, qua các dữ liệu test thì hãng A nóng bao nhiêu độ, cùng điều kiện thì hãng B như thế nào? Từ đó lựa chọn cho mình motor để trải nghiệm thôi. Chứ tất cả kiến thức hay cả tư vấn cũng chỉ là tham khảo, còn lại nên tự trải nghiệm và lựa chọn cho riêng mình motor phù hợp nhất.
Một số hãng phổ biến: Lumenier (Nghe nói rất ngon nhưng đắt), T-Motor, RCinPower, Brotherhobby,….
Và còn rất nhiều thứ khác liên quan kĩ hơn về motor nhưng sẽ liên quan nhiều đến phần kĩ thuật, kiến thức kiểu hardcore mình đọc cũng ko vào đầu nên nghĩ kiến thức nhiêu đây là đủ cho anh em hiểu và chọn motor rồi. Nếu vẫn muốn tìm hiểu thêm có thể tham khảo nguồn bài viết tại đây.
Facebook Đức: https://www.facebook.com/ducnh18
Instagram: @ducnh91
Đọc thêm kinh nghiệm liên quan: Kiến thức về Pin LiPo và cách sử dụng an toàn – hiệu quả nhất · Kiến thức về cánh và cách chọn cánh phù hợp trong FPV · Nhập môn FPV – Hướng dẫn chơi FPV – Chơi FPV bắt đầu từ đâu?

em hiện đang sử dụng động cơ 2300KV cánh 10 inches cho khung 450mm nhưng em chủ yếu bay thấp để phục vụ nghiên cứu thì có ảnh hưởng gì nhiều k ạ , em cảm ơn